

相关题库推荐
 2024-11-20
2024-11-20
 共24道
共24道
相关试题
简答题 考虑矢量3i+5j+7k经矢量2i-3j+4k平移变换后得到的新点矢量。
简答题 如图所示的三自由度机械手(两个旋转关节加一个平移关节,简称RPR机械 手),求末端机械手的运动方程。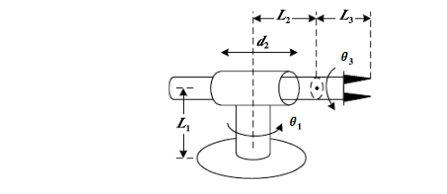
简答题 机器人关节是如何定义的?机器人的两种关节类型是什么?
简答题 机器人常用坐标系有哪几种?
简答题 坐标系{B}初始与{A}重合,坐标系{B}先绕Az轴旋转θ角,再绕By旋转φ角, 求按上述顺序旋转后得到的旋转矩阵。
简答题 简述工具坐标系的位置标定原理?
简答题 什么是机器人运动学逆解的多重性?
简答题 坐标系{B}初始与{A}重合,坐标系{B}先绕Az轴旋转θ角,再绕Ay旋转φ角, 求按上述顺序旋转后得到的旋转矩阵。
